MOF-derived magnetic microrobots for the active capture of nanoplastics


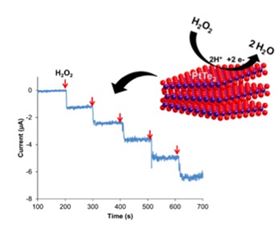
Self-propelled micromachines have recently attracted attention for environmental remediation, yet their use for radioactive waste management has not been addressed. Engineered micromotors that are able to combine highly adsorptive capabilities together with fast autonomous motion in liquid media are promising tools for the removal of nuclear waste, which is one of the most difficult types to manage. Herein, we fabricate self-propelled micromotors based on metal–organic frameworks (MOFs) via template-based interfacial synthesis and show their potential for efficient removal of radioactive uranium. A crucial challenge of the MOF-based motors is their stability in the presence of fuel (hydrogen peroxide) and acidic media. We have ensured their structural stability by Fe doping of zeolitic imidazolate framework-8 (ZIF-8). The implementation of magnetic ferroferric oxide nanoparticles (Fe3O4 NPs) and catalytic platinum nanoparticles (Pt NPs) results in the magnetically responsive and bubble-propelled micromotors. In the presence of 5 wt % H2O2, these micromotors are propelled at a high speed of ca. 860 ± 230 μm·s–1 (i.e., >60 body lengths per second), which is significantly faster than that of other microrod-based motors in the literature. These micromotors demonstrate a highly efficient removal of uranium (96%) from aqueous solution within 1 h, with the subsequent recovery under magnetic control, as well as stable recycling ability and high selectivity. Such self-propelled magnetically recoverable micromotors could find a role in the management and remediation of radioactive waste.
MOF-derived magnetic microrobots for the active capture of nanoplastics

Molecularly Engineered Fluorescent Magnetic Microrobots for Sensing High-Energy Nitroaromatic Explosives in Highly Acidic Aqueous Environments

Magneto-Fluorescent Microrobots with Selective Detection Intelligence for High-Energy Explosives and Antibiotics in Aqueous Environments