Single-Atom Colloidal Nanorobotics Enhanced Stem Cell Therapy for Corneal Injury Repair


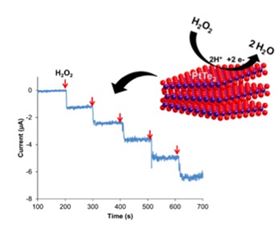
Recently a significant amount of attention has been paid towards the development of man-made synthetic catalytic micro- and nanomotors that can mimic biological counterparts in terms of propulsion power, motion control, and speed. However, only a few applications of such self-propelled vehicles have been described. Here the magnetic control of self-propelled catalytic Ti/Fe/Pt rolled-up microtubes (microbots) that can be used to perform various tasks such as the selective loading, transportation, and delivery of microscale objects in a fluid is shown; for instance, it is demonstrated for polystyrene particles and thin metallic films ("nanoplates"). Microbots self-propel by ejecting microbubbles via a platinum catalytic decomposition of hydrogen peroxide into oxygen and water. The fuel and surfactant concentrations are optimized obtaining a maximum speed of 275 mu m s(-1) (5.5 body lengths per second) at 15% of peroxide fuel. The microbots exert a force of around 3.77 pN when transporting a single 5 mu m diameter particle; evidencing a high propulsion power that allows for the transport of up to 60 microparticles. By the introduction of an Fe thin film into the rolled-up microtubes, their motion can be fully controlled by an external magnetic field.
Single-Atom Colloidal Nanorobotics Enhanced Stem Cell Therapy for Corneal Injury Repair
Translational nanorobotics breaking through biological membranes

Precision Engineering of Nanorobots: Toward Single Atom Decoration and Defect Control for Enhanced Microplastic Capture